I teach a robotics class at a middle school in Central Florida near Orlando. My classes are mostly 6th grade with a few 7th graders, and I have between 30 and 32 students per class.
In September 2017, Hurricane Irma impacted our region. We lost a week of school because of power loss and the need to repair damage to school buildings. As a final project for my robotics class and inspired by Ian Chow-Miller’s videos of his students’ Search and Rescue robots, I created a Hurricane aftermath board, with several missions for the students to choose from.
See below for a full description of the challenge missions and an assessment rubric.

Working in teams of three, the students had to design, build, and program a robot to complete at least one mission from the board. They started by working through the first steps of the Engineering Design Process (see LEGOFinalProjectEDP). I set this up as a Google Doc, using Doctopus to assign one document to each team, so that they can all work on it at the same time. I could also check to see that all three students contributed. Once they had a reasonable robot design and program algorithm, they could start to build.
Each student had a specific role in the team: they could be the foreman, secretary, or materials manager.
- The foreman keeps the group on task and focused.
- The secretary makes sure that all the necessary documents are completed and turned in.
- The materials manager finds any extra bits and pieces necessary to complete a build and makes sure that all pieces are picked up and put away at the end of the period.
Additionally, all students were expected to participate in both building and programming.
The challenge
You can see the disaster area on the LEGO table.
- Your robot must start somewhere in the start area.
- Your robot wheels may not go in the “water”.
- You may cross the road lines unless your task says not to.
- Be careful not to kill the cow. If you do, you will lose 5 points.
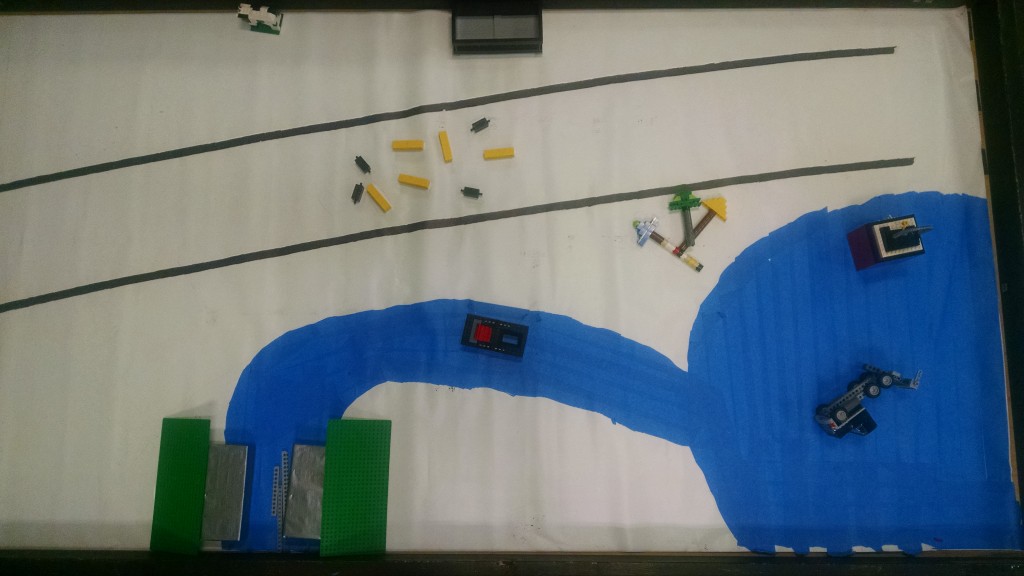
The missions are:
Debris
- There is a road covered in debris. You must clear it so that emergency vehicles can use the road. You can either:
a) Clear the debris off the road moving it outside the black lines, or
b) Collect the debris and take it back home. Stay inside the road lines while you are clearing. - Wow! points if you get it into the black dumpster.
People
- The river runs into a flooded lake.
- Rescue the people stranded on the roof of a house.
- Bring them back to the start.
Bridge
- The bridge over the river has been swept away.
- Lay a new bridge and cross the river.
Trees
- Trees have been knocked over – pick up at least one and take it back to the start.
- Wow! points if you remove more than one.
- Wow! points if they go into the black dumpster on the other side of the road.
Car
- Get the car out of the river and take it back to the start.
- Wow! points if you get it into the dumpster.
Instructions
You only need to do ONE (1) of the missions. You may do more for extra credit.
Once your team has chosen a mission, complete the Final Project Planning Document in your shared folder. Your team will work on the SAME document.
You may not touch your robot tub or robot until you have completed the planning document.
This is what you need to have in the planning document:
- A paragraph describing the task you chose, giving reasons why you chose that task.
- Do some research about robot design for this project. Give the URL and bullet points of important information from at least three sites.
- Develop three good solutions – possible robot structures.
- Choose the best solution.
- Explain why you think it is the best solution.
- Describe or draw the robot design.
- Write an algorithm that you will use to develop your program. This is a set of step by step instructions like:
- robot moves forward 30 cm
- robot turns 90 degrees to the left
- arm goes up 120 degrees
While you are designing and building the robot, read the rubric (see below) over and over again to make sure that you include all the requirements.
Your program must be annotated and turned in.
Rubric
| Preparation (the Google Doc) | Points available |
| Paragraph describing your choice of mission and reasons | 5 |
| Paragraph describing your research | 5 |
| Three solutions | 5 |
| Best solution and reasons | 5 |
| Robot design description | 5 |
| Paragraph describing the algorithm for your program | 5 |
| Preparation subtotal | 30 |
| Presentation | |
| Appropriate robot design | 10 |
| Well-planned movements | 5 |
| Attachment appropriate for the mission | 10 |
| Variation in speed of the robot | 5 |
| At least one sensor used | 10 |
| Robot is stable and reliable | 5 |
| Performance was autonomous | 5 |
| Mission is completed successfully | 5 |
| Charging port is easily accessible | 5 |
| WOW factor! (Extra credit) | (5) |
| Presentation subtotal | 60 |
| Annotated program was turned in | 10 |
| Total | 100 |
Results
Here are some of videos of the results. The first video shows a robot undertaking three missions (Debris, Trees and Car), two videos show unsuccessful attempts at the People mission, and two videos show different solutions for the Debris mission.
This was our most successful robot, undertaking the Debris, Trees, and Car missions.
An attempt at the People mission.
Another nice try at the People mission.
A simple solution to the Debris mission.
Another approach to the Debris mission.
Reflections
Although the whole class had seen Ian Chow-Miller’s Search and Rescue robot videos, very few students realized that they were like these missions, and so didn’t cite them in their research paragraph until I suggested it. I must find a way to make this more obvious. Next time, I might do a class-wide brainstorming lesson, analyzing each mission, and perhaps doing some of the research with them, so that everyone gets ideas on all the missions.
I was disappointed at first that almost everyone was using passive attachments. I think this was partly because we had lost so many school days that we had to cut some of the curriculum, and they hadn’t had much time to think about attachments. I gave a brief refresher lesson on powered attachments, and many teams redesigned their robots to use these.
Over all, this was a very successful challenge. Although the results varied, I saw a level of commitment and work that I had not seen all semester. The missions were designed to range from very simple to definitely challenging, so that students could choose a mission at a level they felt comfortable with, or attempt something out of their comfort zone. Even the least interested students tried their hardest and were eager to produce a working robot. One team tried all five missions, completing three successfully, and a few other teams did two missions. Each team managed to complete at least one mission.
Latest posts by Lana Pereira (see all)
- Hurricane Disaster Recovery - 19 April 2018