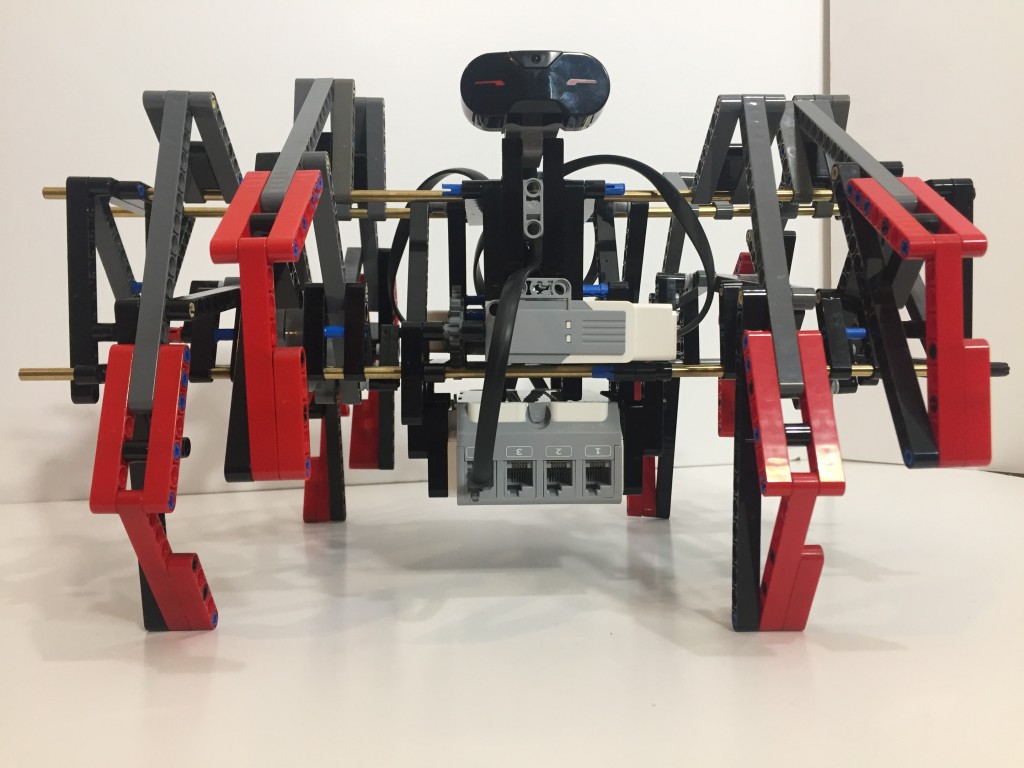
This creation is a LEGO-based version of Klann’s Mechanical Spider, which makes use of one of the best known walking mechanisms, the Klann linkage. The Klann linkage was designed by mechanical engineer Joe Klann and is very sturdy.
Several large creations based on Klann’s linkage have appeared at the annual Burning Man festival, including a 7 ton version built by MoltenSteelMan:
There were two main challenges in creating our design: approximating Klann’s linkage in LEGO and achieving consistent foot speed.
Challenge 1: Approximating Klann’s linkage in LEGO
Walking machine linkages can be modified to produce different types of foot paths.
A foot path is the way in which the part of the walking linkage in contact with the ground moves.
Desirable characteristics of foot paths are:
- A high percentage of foot contact with the ground per axle rotation. (Represented by the flat, lower part of the dotted foot path in the below video).
- Consistent foot-speed while in contact with the ground, so that the feet don’t skid or shake the machine (Represented by the density of dots, high density = slow, low density = high, in the below video).
- The ability to “step” reasonably high to walk on rugged terrain (Represented by the height of the dotted foot path in the below video).
I was able to do a simple optimization of the Klann linkage by creating a simulator of Klann’s linkage in the computer program Scratch.
You can use this simulator to create your own customized Klann linkages here.
Scratch allowed me to adjust the mechanism’s bar lengths by integer numbers to find a combination that created an optimal foot path in LEGO.
Challenge 2: Achieving consistent foot speed
Even with a linkage optimizer, it is still difficult achieve consistent foot speed with Klann’s linkage. This isn’t an issue when on smooth surfaces, as the feet can slide. When on rough terrain, however, the increased traction of each foot causes Klann to lurch, as seen below:
How does one go about solving this? One way to stabilize the foot speed is to add rotating feet, decreasing the traction of each foot, which dampens the lurching effect.
You can see this solution implemented in this video.
Finally, here’s our latest version of Klann, which incorporates the linkage optimized in Scratch along with longer legs so that the EV3 brick can be mounted underneath Klann’s frame.
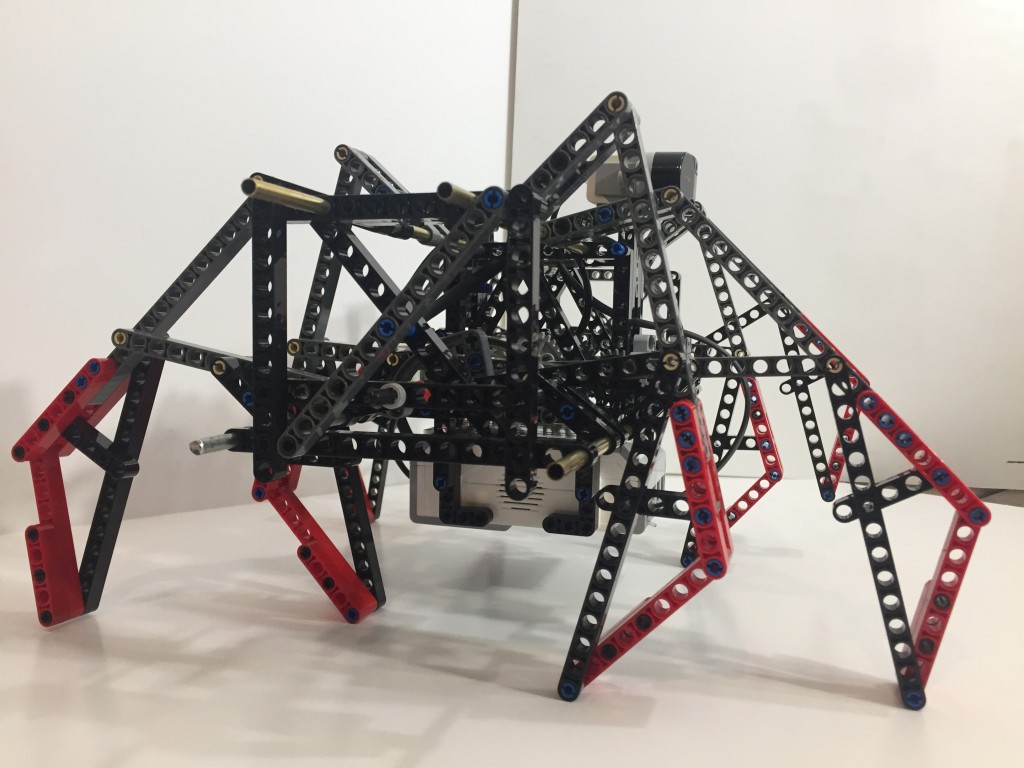
Note that this version does not have rotating feet. You’re encouraged to add them, or to come up with your own solution if you want to improve performance on terrain that has traction.
For more information, visit Klann’s Mechanical Spider with Longer Legs (Ver 3) at www.DIYwalkers.com. If you decide to build your own, please let us know.
Also in DIY Walkers
- Hexapod TrotBot: A classroom-friendly DIY walker
- DIY Walkers: Klann’s Mechanical Spider
- Rapidly Prototyping Strider – Smoother, Stronger, Faster
Ben Vagle
Latest posts by Ben Vagle (see all)
- DIY Walkers: Klann’s Mechanical Spider - 26 March 2018
- Hexapod TrotBot: A classroom-friendly DIY walker - 19 October 2017
- EV3 TrotBot Version 2: Inspired by a Galloping Horse - 4 May 2017
- DIY Walkers: Strider - 29 January 2017
- DIY Walkers: TrotBot using EV3 - 28 December 2016


