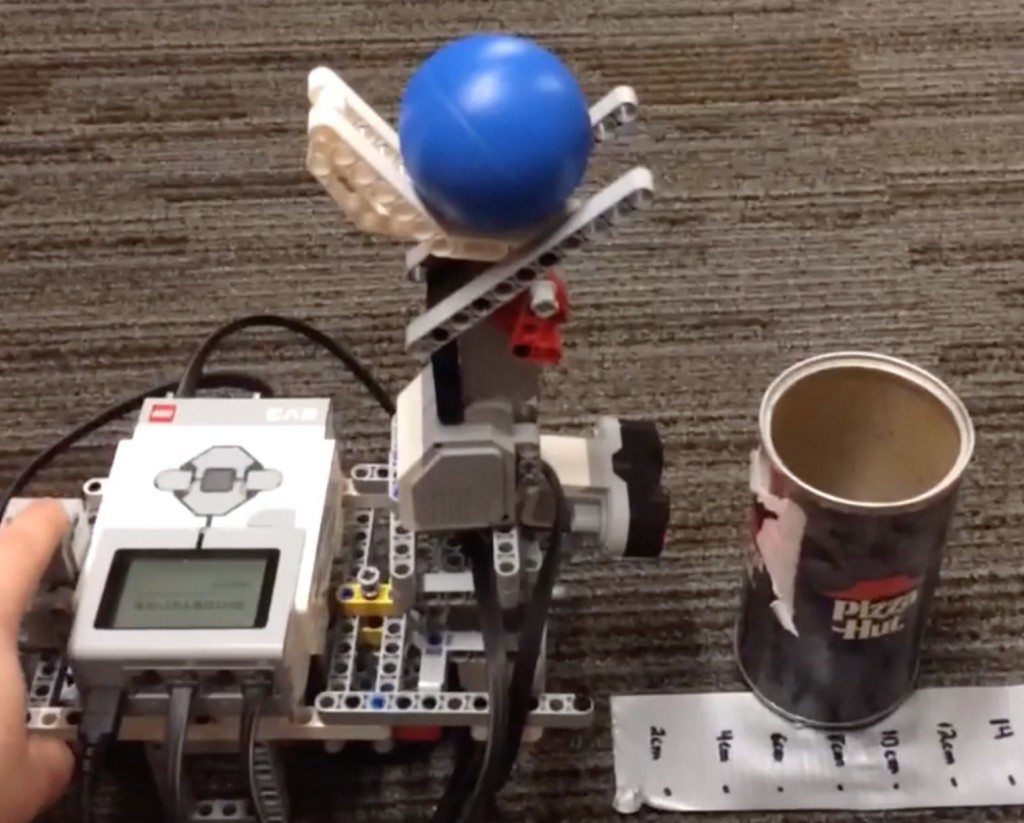
 This is the EV3 projectile launcher, inspired by RobotlCare’s Ball3r.
This is the EV3 projectile launcher, inspired by RobotlCare’s Ball3r.
The goal behind the EV3 Projectile Launcher is to provide students with a way to explore projectile motion by creating a LEGO EV3 robot to generate it.
After creating the launch structure, students will need to derive a relationship between EV3 motor power, and the distance a ball is launched. This relationship is then incorporated into an EV3 program used to control the robot. Using the EV3 Ultrasonic sensor, the projectile Launcher senses the distance to a desired target, and then calculates the necessary motor power to launch a ball the correct distance. A target can be placed anywhere within a 15in radius and the projectile launcher will successfully hit it!
Challenging students to create an EV3 projectile launcher is a hands on way to explore projectile motion in the classroom. To start, the physical build of the shooter challenges students to think critically about how to build something that will execute a desired function. Next, the relationship between the distance the ball is shot and the power of the motor must be derived through data collection and analysis.
Resources
- EV3 Projectile Launcher Build Instructions (pdf, 39MB)
- EV3 Projectile Launcher Data Sheet1 (pdf)
- EV3 Projectile Launcher Program (zipped EV3 file)
Sara Willner-Giwerc
Latest posts by Sara Willner-Giwerc (see all)
- Open Roberta Lab - 22 October 2016
- Open Roberta: A review - 10 September 2015
- EV3 Projectile Launcher - 8 May 2015


Is there anywhere that explains the math involved? I see the datasheet, but I don’t understand what the numbers represent.
A more in-depth explanation of the math behind the project is as follows:
Once the launcher is constructed, the relationship between the power of the launching motor and how far the ball goes needs to be quantified. To do this, students should conduct an experiment where they launch the ball with the motor at several different powers, and record the distance the ball travels each time. The data that I took is shown in the attached data sheet. By plotting this data, we can see that there is an exponential relationship between the power of the motor and how far the ball is launched. Using excel, I created a best fit curve and found the relationship to be the equation noted on the graph! This relationship is then used to program the EV3 to shoot the ball using the correct motor power based on the desired launch distance. Hope this helps!
Hello! Is there a maximum power that the robot can reach? I am trying for a 300cm…
Hi,
My students picked up your design and implemented it for their Robot Game challenge. Here is a short video they made about the catapult.
https://drive.google.com/file/d/1NhmXYlaDSNFyIXAsFs5SX8tW2s8xLmKG/view?usp=sharing
Ms. Taylor
Expeditions Teacher: STEM
Summit Public Schools