Here’s another easy challenge to expose students to linkages. Jumpers use the same 4-bar linkage as punchers, but are angled to push down to drive the mechanism up.
They can be easily modified to jump straight up, or to hop in a direction by either changing the angle of the legs, or by orienting both legs forward like in the following video:
How else can your engineers make them hop forward? What methods result in the farthest hop?
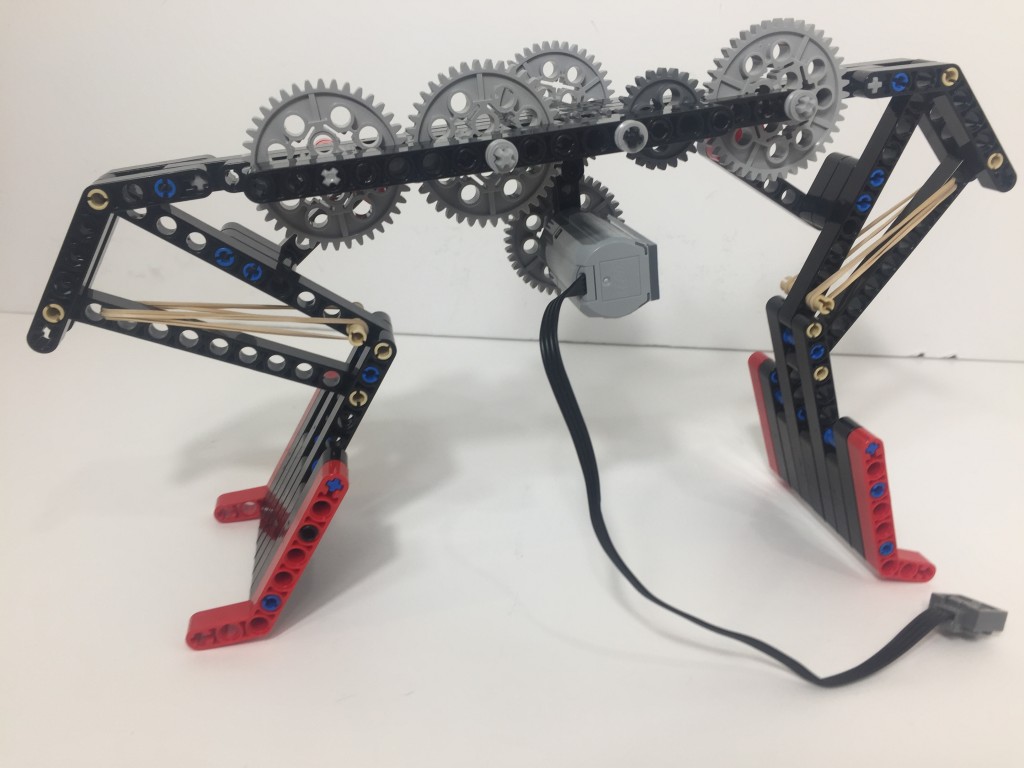
For a more complicated challenge, jumpers can be motorized, which allows students to explore how the timing of the front and back legs affect hopping. Here’s a video of a couple experiments – can your engineers figure out why delaying the front leg’s jump causes the robot to hop forward?
This isn’t a very robust build, more of a quick hack to test the impact of leg timing, so we didn’t post build instructions. Maybe we will in the future if we put more work into building a robust hopper – or if your engineers come up with a better design – but for now you can find detailed pictures of this build here.
Also in DIY Walkers
- Rapidly Prototyping Strider – Smoother, Stronger, Faster
- Linkage Warm Ups 1: LEGO Punchers and the 4-Bar Linkage
- Linkage Warm Ups 2: LEGO Jumpers and Hoppers
Latest posts by Wade (see all)
- Linkage Warm Ups 2: LEGO Jumpers and Hoppers - 28 May 2019
- Linkage Warm Ups 1: LEGO Punchers and the 4-Bar Linkage - 13 April 2019
- Rapidly Prototyping Strider – Smoother, Stronger, Faster - 30 August 2018
- How to build and safely use a bridge tester - 10 July 2015
- TrotBot Walking Machine - 5 July 2015


